\(\newcommand{L}[1]{\| #1 \|}\newcommand{VL}[1]{\L{ \vec{#1} }}\newcommand{R}[1]{\operatorname{Re}\,(#1)}\newcommand{I}[1]{\operatorname{Im}\, (#1)}\)
Formula for rotating a vector in 2D¶
Let’s say we have a point \((x_1, y_1)\). The point also defines the vector \((x_1, y_1)\).
The vector \((x_1, y_1)\) has length \(L\).
We rotate this vector anticlockwise around the origin by \(\beta\) degrees.
The rotated vector has coordinates \((x_2, y_2)\)
The rotated vector must also have length \(L\).
Theorem¶
Preliminaries¶
Call the angle between \((x_1, y_1)\) and the x-axis : \(\alpha\). Then:
We rotate \((x_1, y_1)\) by angle \(\beta\) to get \((x_2, y_2)\). So the angle between \((x_2, y_2)\) and the x-axis is \(\alpha + \beta\):
Proof by the angle sum rule¶
If you are happy with The angle sum rule proof, then we are most of the way there.
The angle sum rule gives us:
So, substituting from equations (1), (2):
We do the matching substitutions into \(\sin(\alpha + \beta)\) to get \(y_2\).
\(\blacksquare\)
Proof by long-hand variant of angle sum proof¶
This section doesn’t assume the angle sum rule, but uses a version of the angle-sum proof to prove the rotation formulae.
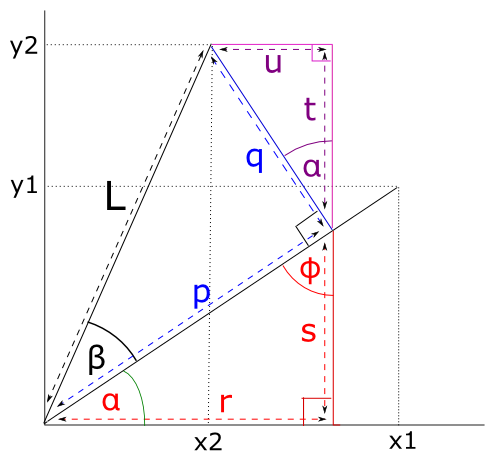
We can see from the picture that:
We are going to use some basic trigonometry to get the lengths of \(r, u, t, s\).
Because the angles in a triangle sum to 180 degrees, \(\phi\) on the picture is \(90 - \alpha\) and therefore the angle between lines \(q, t\) is also \(\alpha\).
Remembering the definitions of \(\cos\) and \(\sin\):
Thus:
So:
\(\blacksquare\).