
Calculating transformations between images#
In which we discover optimization, cost functions and how to use them.
# - import common modules
import numpy as np # the Python array package
# Tell numpy to print numbers to 4 decimal places only
np.set_printoptions(precision=4, suppress=True)
import matplotlib.pyplot as plt # the Python plotting package
# Set gray colormap by default.
plt.rcParams['image.cmap'] = 'gray'
import nibabel as nib
import nipraxis
Introduction#
We often want to work out some set of spatial transformations that will make one image be a better match to another.
One example is motion correction in FMRI. We know that the subject moves over the course of an FMRI run. To correct for this, we may want to take each volume in the run, and match this volume to the first volume in the run. To do this, we need to work out what the best set of transformations are to match - say - volume 1 to volume 0.
Get the data#
We start with a single slice from the each of the first two volumes in the EPI (BOLD) data.
# Fetch the data file.
import nipraxis
# Fetch image file.
bold_fname = nipraxis.fetch_file('ds107_sub012_t1r2.nii')
img = nib.load(bold_fname)
data = img.get_fdata()
data.shape
(64, 64, 35, 166)
Get the first and second volumes:
vol0 = data[..., 0]
vol1 = data[..., 1]
vol1.shape
(64, 64, 35)
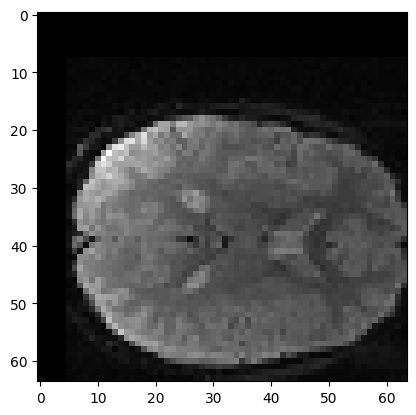
Now we get our slices. Here I am getting slice index 17 in z, from the first volume:
mid_vol0 = vol0[:, :, 17]
plt.imshow(mid_vol0)
<matplotlib.image.AxesImage at 0x7f3754e68d60>

Here is the corresponding slice from volume 1:
mid_vol1 = vol1[:, :, 17]
plt.imshow(mid_vol1)
<matplotlib.image.AxesImage at 0x7f3754b905b0>
We might want to match these two slices so they are in the same position. We will try and match the slices by moving the voxel values in slice 1 so that they are a better match to the voxel values in slice 0. Our job is to find the best set of transformations to do this.
We would like to have some automatic way to calculate these transformations.
The rest of this page is about how this automated method could (and does) work.
At the moment it is hard to see any difference between the two images. That is still true even if we put the slices side by side:
fig, axes = plt.subplots(1, 2)
axes[0].imshow(mid_vol0)
axes[0].set_title('slice 0')
axes[1].imshow(mid_vol1)
axes[1].set_title('slice 1')
Text(0.5, 1.0, 'slice 1')
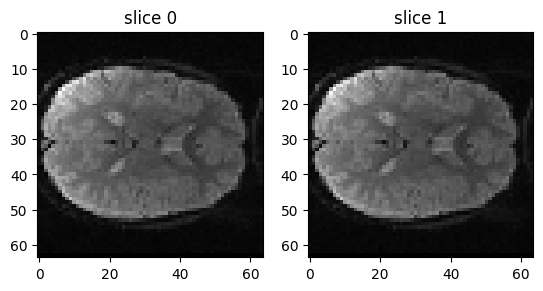
The slices are very similar, because the movement between the two volumes is very small - often the movements in an FMRI run are less than a single voxel.
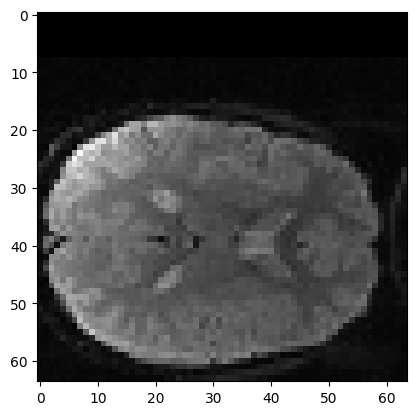
In order to show the automated matching procedure in action, let’s start
with an image that is obviously badly matched with slice 0. We will do
this by pushing slice 0 (mid_vol1) 8 voxels down.
After that we will try to match the shifted version
(shifted_mid_vol1) to mid_vol0:
# Make slice full of zeros like mid_vol1 slice
shifted_mid_vol1 = np.zeros(mid_vol1.shape)
# Fill the lower 54 (of 64) x lines with mid_vol1
shifted_mid_vol1[8:, :] = mid_vol1[:-8, :]
# Now we have something like mid_vol1 but translated
# in the first dimension
plt.imshow(shifted_mid_vol1)
<matplotlib.image.AxesImage at 0x7f3754adab00>
Formulating the matching problem#
Let’s say we did not know how many voxels the image had been translated. We want a good way to find out.
Let’s put our problem in a more concrete form. We are going to try
translating our shifted_mid_vol1 over the first (\(x\)) axis.
Call this translation \(t\), so a movement of -5 voxels in \(x\)
gives \(t=-5\).
Call the first image \(\mathbf{X}\) (mid_vol0 in our case). Call
the second image \(\mathbf{Y}\) (shifted_mid_vol1 in our case).
\(\mathbf{Y}_t\) is \(\mathbf{Y}\) translated in \(x\) by
\(t\) voxels.
\(t\) is a good translation if the image \(\mathbf{Y}_t\) is a good match for image \(\mathbf{X}\).
We need to quantify what we mean by good match. That is, we need some measure of quality of match, given two images \(\mathbf{X}\) and \(\mathbf{Y}\). Call this measure \(M(\mathbf{X}, \mathbf{Y})\), and let us specify that the value of \(M(\mathbf{X}, \mathbf{Y})\) should be lower when the images match well. We could therefore call \(M(\mathbf{X}, \mathbf{Y})\) a mismatch function.
Now we can formulate our problem - we want to find the translation \(t\) that gives the lowest value of \(M(\mathbf{X}, \mathbf{Y_t})\). We can express this as:
Read this as “the desired translation value \(\hat{t}\) is the value of \(t\) such that \(M(\mathbf{X}, \mathbf{Y_t})\) is minimized”.
Practically, we are going to need the following things:
a function to generate \(\mathbf{Y_t}\) given \(\mathbf{Y}\) and \(t\). Call this the transformation function;
a function \(M\) to give the mismatch between two images. Call this the mismatch function.
Here’s the transformation function to generate \(\mathbf{Y_t}\) - the image \(\mathbf{Y}\) shifted by \(t\) voxels in \(x\):
def x_trans_slice(img_slice, x_vox_trans):
""" Return copy of `img_slice` translated by `x_vox_trans` voxels
Parameters
----------
img_slice : array shape (M, N)
2D image to transform with translation `x_vox_trans`
x_vox_trans : int
Number of pixels (voxels) to translate `img_slice`; can be
positive or negative.
Returns
-------
img_slice_transformed : array shape (M, N)
2D image translated by `x_vox_trans` pixels (voxels).
"""
# Make a 0-filled array of same shape as `img_slice`
trans_slice = np.zeros(img_slice.shape)
# Use slicing to select voxels out of the image and move them
# up or down on the first (x) axis
if x_vox_trans < 0:
trans_slice[:x_vox_trans, :] = img_slice[-x_vox_trans:, :]
elif x_vox_trans == 0:
trans_slice[:, :] = img_slice
else:
trans_slice[x_vox_trans:, :] = img_slice[:-x_vox_trans, :]
return trans_slice
Choosing a metric for image mismatch#
Next we need a mismatch function that accepts two images, and returns a scalar value that is low when the images are well matched.
We could imagine a mismatch measure that used the values from subtracting the two images:
plt.imshow(mid_vol0 - shifted_mid_vol1)
<matplotlib.image.AxesImage at 0x7f3754b71120>
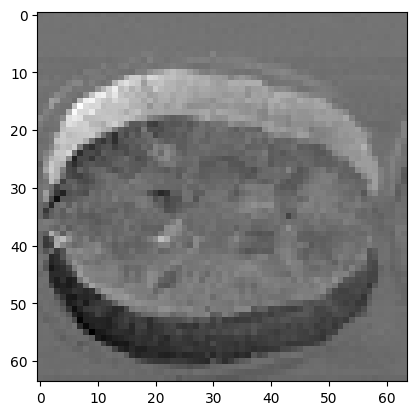
Can we take the sum of this difference as our scalar measure of mismatch?
No, because the negative numbers (black) will cancel out the positive numbers (white). We need something better:
def mean_abs_mismatch(slice0, slice1):
""" Mean absolute difference between images
"""
return np.mean(np.abs(slice0 - slice1))
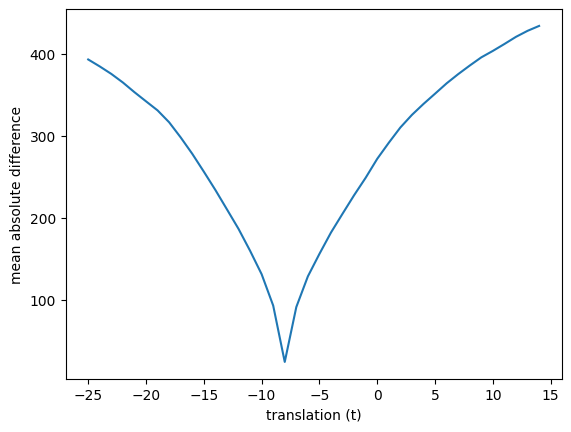
Now we can check different values of translation with our mismatch function. We move the image up and down for a range of values of \(t\) and recalculate the mismatch measure for every candidate translation:
mismatches = []
translations = range(-25, 15) # Candidate values for t
for t in translations:
# Make the translated image Y_t
unshifted = x_trans_slice(shifted_mid_vol1, t)
# Calculate the mismatch
mismatch = mean_abs_mismatch(unshifted, mid_vol0)
# Store it for later
mismatches.append(mismatch)
plt.plot(translations, mismatches)
plt.xlabel('translation (t)')
plt.ylabel('mean absolute difference')
Text(0, 0.5, 'mean absolute difference')
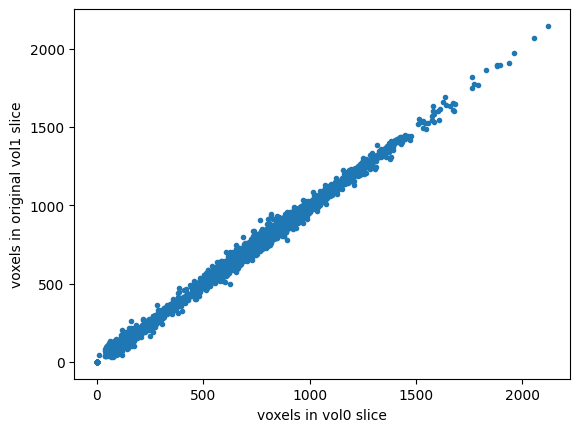
We can try other measures of mismatch. Another measure of how well the images match might be the correlation of the voxel values at each voxel. When the images are well matched, we expect black values in one image to be matched with black in the other, ditto for white.
# Number of voxels in the image
n_voxels = np.prod(mid_vol1.shape)
# Reshape vol0 slice as 1D vector
mid_vol0_as_1d = mid_vol0.reshape(n_voxels)
# Reshape vol1 slice as 1D vector
mid_vol1_as_1d = mid_vol1.reshape(n_voxels)
# These original slices should be very close to each other already
# So - plotting one set of image values against the other should
# be close to a straight line
plt.plot(mid_vol0_as_1d, mid_vol1_as_1d, '.')
plt.xlabel('voxels in vol0 slice')
plt.ylabel('voxels in original vol1 slice')
# Correlation coefficient between them
np.corrcoef(mid_vol0_as_1d, mid_vol1_as_1d)[0, 1]
0.9981194331127773
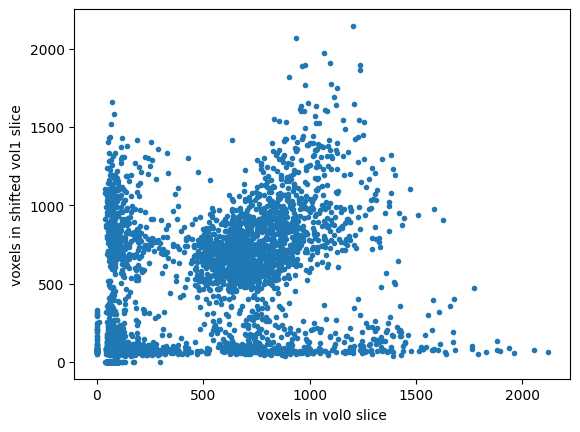
# The shifted slice will be less well matched
# Therefore the line will be less straight and narrow
plt.plot(mid_vol0_as_1d, shifted_mid_vol1.ravel(), '.')
plt.xlabel('voxels in vol0 slice')
plt.ylabel('voxels in shifted vol1 slice')
# Correlation coefficient between them will be nearer 0
np.corrcoef(mid_vol0_as_1d, shifted_mid_vol1.ravel())[0, 1]
0.4462869363826718
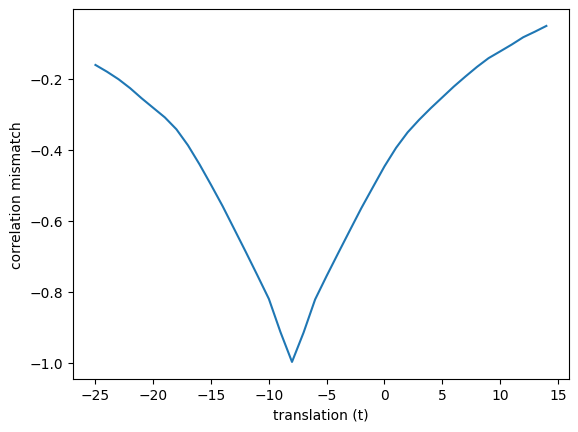
We expect that the correlation will be high and positive when the images are well matched. Our mismatch measure, on the other hand, should be low when the images are well-matched. So, we can use the negative correlation as our mismatch measure:
def correl_mismatch(slice0, slice1):
""" Negative correlation between the two images, flattened to 1D """
correl = np.corrcoef(slice0.ravel(), slice1.ravel())[0, 1]
return -correl
correl_mismatches = []
translations = range(-25, 15) # Candidate values for t
for t in translations:
unshifted = x_trans_slice(shifted_mid_vol1, t)
mismatch = correl_mismatch(unshifted, mid_vol0)
correl_mismatches.append(mismatch)
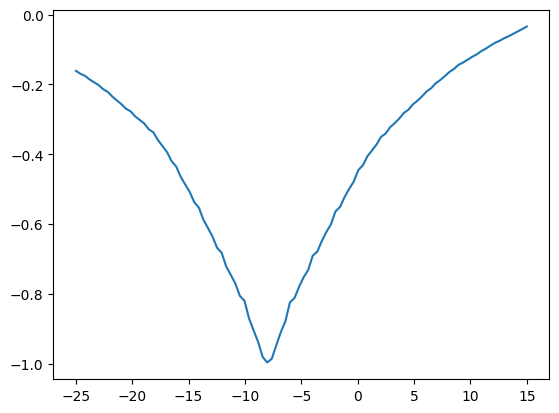
plt.plot(translations, correl_mismatches)
plt.xlabel('translation (t)')
plt.ylabel('correlation mismatch')
Text(0, 0.5, 'correlation mismatch')
So far we have only tried translations of integer numbers of voxels (0, 1, 2, 3…).
How about non-integer translations? Will these work?
To do a non-integer translation, we have to think more generally about how to make an image that matches another image, after a transformation.
Resampling in 2D#
We need a more general resampling algorithm. This is like the 1D interpolation we do for Slice timing correction, but in two dimensions.
Let’s say we want to do a voxel translation of 0.5 voxels in x. The way we might go about this is the following.
To start, here are some names:
img0is the image we are trying to match to (in our casemid_vol0);img1is the image we are trying to match by moving (in our caseshifted_mid_vol1);transis the transformation from pixel coordinates inimg1to pixel coordinates inimg0(in our case adding 0.5 to the first coordinate value, so that [0, 0] becomes [0.5, 0]);itransis the inverse oftrans, and gives the transformation to go from pixel coordinates inimg0to pixel coordinates inimg1. In our case this is subtracting 0.5 from the first coordinate value.
The procedure for resampling is:
Make a 2D image the same shape as the image we want to match to (
img0) - call thisnew_img0;For each pixel in
new_img0;call the pixel coordinate for this pixel:
coord_for_img0;transform
coord_for_img0usingitrans. In our case this would be to subtract 0.5 from the first coordinate value ([0, 0] becomes [-0.5, 0]). Call the transformed coordinatecoord_for_img1;Estimate the pixel value in
img1at coordinatecoord_for_img1. Call this valueimg1_value_estimate;Insert
img1_valueintonew_img0at coordinatecoord_for_img0.
The “Estimate pixel value” step is called resampling. As you can see this is the same general idea as interpolating in one dimension. We saw one dimensional interpolation for Slice timing correction. There are various ways of interpolating in two or three dimensions, but one of the most obvious is the simple extension of linear interpolation to two (or more) dimensions - bilinear interpolation.
The scipy.ndimage library has routines for resampling in 2 or 3 dimensions:
import scipy.ndimage as snd
In fact the affine_transform function from scipy.ndimage will do
the whole process for us.
def fancy_x_trans_slice(img_slice, x_vox_trans):
""" Return copy of `img_slice` translated by `x_vox_trans` voxels
Parameters
----------
img_slice : array shape (M, N)
2D image to transform with translation `x_vox_trans`
x_vox_trans : float
Number of pixels (voxels) to translate `img_slice`; can be
positive or negative, and does not need to be integer value.
"""
# Resample image using bilinear interpolation (order=1)
trans_slice = snd.affine_transform(
img_slice,
[1, 1],
[float(-x_vox_trans), 0],
order=1)
return trans_slice
fine_mismatches = []
fine_translations = np.linspace(-25, 15, 100)
for t in fine_translations:
unshifted = fancy_x_trans_slice(shifted_mid_vol1, t)
mismatch = correl_mismatch(unshifted, mid_vol0)
fine_mismatches.append(mismatch)
/opt/hostedtoolcache/Python/3.10.11/x64/lib/python3.10/site-packages/scipy/ndimage/_interpolation.py:606: UserWarning: The behavior of affine_transform with a 1-D array supplied for the matrix parameter has changed in SciPy 0.18.0.
warnings.warn(
plt.plot(fine_translations, fine_mismatches)
[<matplotlib.lines.Line2D at 0x7f374baed510>]
We are looking for the best x translation. At the moment we have to sample lots of x translations and then choose the best. Is there a better way?
Optimization#
Optimization is a field of mathematics / computer science that solves this exact problem.
There are many optimization routines in Python, MATLAB and other languages. These routines typically allow you to pass some function, called the objective function, or the cost function. The optimization routine returns the parameters of the cost function that give the lowest value.
In our case, the cost function we need to minimize will accept one parameter (the translation), and return the mismatch value for that translation. So, it will need to create the image \(\mathbf{X_t}\) and return \(M(\mathbf{X}, \mathbf{Y_t})\).
What does it mean to “pass” a function in Python. Remember that, in Python, Functions are objects like any other.
The optimization works by running the cost function at some starting value of the parameter (in our case, x translation), and using an algorithm to choose the next value of the parameter to try. It continues trying new values until it finds a parameter value for which very small changes of the parameter up or down only increase the cost function value. At this point the routine stops and returns the parameter value.
def cost_function(x_trans, target, moving):
""" Correlation of `target` array and `moving`, after applying `x_trans`.
`target` is the array we are trying to match to. `moving` is the array we
are trying to match, by using the `x_trans` transform.
`x_trans` is the correct x translation to go from an x coordinate in the
`moving` image to an x coordinate in the `target` image. It is therefore
the "push" transformation. Conversely, we need `-x_trans` to go from the
`target` coordinate to the `moving` coordinate. This is the "pull"
transformation.
"""
# Calculate X_t - image translated by x_trans
unmoved = fancy_x_trans_slice(moving, x_trans)
# Return mismatch measure for the translated image X_t
return correl_mismatch(unmoved, target)
# Value of the negative correlation for no translation.
cost_function(0, mid_vol0, shifted_mid_vol1)
-0.44628693638267175
# Value of the negative correlation for translation of -8 voxels.
cost_function(-3, mid_vol0, shifted_mid_vol1)
-0.6268892014543177
Now we get a general optimizing routine from the scipy Python
library. fmin_powell finds the minimum of a function using Powell’s
method of numerical
optimization:
from scipy.optimize import fmin_powell
We pass the fmin_powell routine our Python cost function, and a starting
value of zero for the translation. We also need to pass the arguments after
x_trans in our cost function as the args argument. This allows
fmin_powell to call the cost function, and pass these extra needed arguments.
fmin_powell(cost_function, [0], args=(mid_vol0, shifted_mid_vol1))
Optimization terminated successfully.
Current function value: -0.997032
Iterations: 2
Function evaluations: 25
array([-7.996])
The function ran, and found that a translation value very close to -8 gave the smallest value for our cost function.
What actually happened there? Let’s track the progress of fmin_powell
using a callback function:
def my_callback(params):
print("Trying parameters " + str(params))
fmin_powell calls this my_callback function when it is testing a new
set of parameters.
best_params = fmin_powell(cost_function,
[0],
args=(mid_vol0, shifted_mid_vol1),
callback=my_callback)
best_params
Trying parameters [-7.995]
Trying parameters [-7.996]
Optimization terminated successfully.
Current function value: -0.997032
Iterations: 2
Function evaluations: 25
array([-7.996])
The optimization routine fmin_powell is trying various different
translations, finally coming to the optimum (minimum) translation close to -8.
More than one parameter#
How about adding y translation as well?
Our optimization routine could deal with this in a very simple way - by optimizing the x translation, then the y translation, like this:
Adjust the x translation until it has reached a minimum, then;
Adjust the y translation until it has reached a minimum, then;
Repeat x, y minimization until the minimum for both is stable.
Although we could do that, in fact fmin_powell does something slightly
more complicated when looking for the next best set of parameters to try. The
details are not important to the general idea of searching over different
parameter values to find the lowest value for the cost function.
def fancy_xy_trans_slice(img_slice, x_y_trans):
""" Make a copy of `img_slice` translated by `x_y_trans` voxels
x_y_trans is a sequence or array length 2, containing
the (x, y) translations in voxels.
Values in `x_y_trans` can be positive or negative, and
can be floats.
"""
x_y_trans = np.array(x_y_trans)
# Resample image using bilinear interpolation (order=1)
trans_slice = snd.affine_transform(img_slice, [1, 1], -x_y_trans, order=1)
return trans_slice
def fancy_cost_at_xy(x_y_trans, target, moving):
""" Cost function at xy translation values `x_y_trans`
`target` is the array we are trying to match to. `moving` is the array we
are trying to match, by using the `x_trans` transform.
`x_y_trans` is the correct x translation to go from an x and y coordinate
in the `moving` image to an x and y coordinate in the `target` image. It
is therefore the "push" transformation. Conversely, we need `-x_y_trans`
to go from the `target` coordinate to the `moving` coordinate. This is the
"pull" transformation.
"""
unshifted = fancy_xy_trans_slice(moving, x_y_trans)
return correl_mismatch(unshifted, target)
Do the optimization of fancy_cost_at_xy using fmin_powell:
best_params = fmin_powell(fancy_cost_at_xy,
[0, 0],
args=(mid_vol0, shifted_mid_vol1),
callback=my_callback)
best_params
Trying parameters [-7.995 0. ]
Trying parameters [-7.996 0. ]
Optimization terminated successfully.
Current function value: -0.997032
Iterations: 2
Function evaluations: 129
array([-7.996, 0. ])
Note: You probably noticed that fmin_powell appears to be sticking to
the right answer for y translation (0), without printing out any evidence that
it is trying other y values. This is because of the way that the Powell
optimization works - it is in effect doing separate 1-parameter minimizations
in order to get the final 2-parameter minimization, and it is not reporting
the intermediate steps in the 1-parameter minimizations.
Full 3D estimate#
Now we know how to do two parameters, it is easy to extend this to six parameters.
The six parameters are:
x translation
y translation
z translation
rotation around x axis (pitch)
rotation around y axis (roll)
rotation around z axis (yaw)
Any transformation with these parameters is called a rigid body transformation because the transformation cannot make the object change shape (the object is rigid).
Implementing the rotations is just slightly out of scope for this tutorial (we would have to convert between angles and rotation matrices), so here we do the 3D optimization with the three translation parameters.
To make it a bit more interesting, shift the second volume 8 voxels on the first axis, as we did for the 2D case. We will also push the image 5 voxels forward on the second axis:
shifted_vol1 = np.zeros(vol1.shape)
shifted_vol1[8:, 5:, :] = vol1[:-8, :-5, :]
plt.imshow(shifted_vol1[:, :, 17])
<matplotlib.image.AxesImage at 0x7f373a891c00>
We define resampling for any given x, y, z translation:
def xyz_trans_vol(vol, x_y_z_trans):
""" Make a new copy of `vol` translated by `x_y_z_trans` voxels
x_y_z_trans is a sequence or array length 3, containing
the (x, y, z) translations in voxels.
Values in `x_y_z_trans` can be positive or negative,
and can be floats.
"""
x_y_z_trans = np.array(x_y_z_trans)
# [1, 1, 1] says to do no zooming or rotation
# Resample image using trilinear interpolation (order=1)
trans_vol = snd.affine_transform(vol, [1, 1, 1], -x_y_z_trans, order=1)
return trans_vol
Our cost function:
def cost_at_xyz(x_y_z_trans, target, moving):
""" Give cost function value at xyz translation values `x_y_z_trans`
`target` is the array we are trying to match to. `moving` is the array we
are trying to match, by using the `x_trans` transform.
`x_y_z_trans` are the x, y, z translations mapping from the `moving` to the
`target` volume.
"""
unshifted = xyz_trans_vol(moving, x_y_z_trans)
return correl_mismatch(unshifted, target)
Do the optimization of cost_at_xyz using fmin_powell:
best_params = fmin_powell(cost_at_xyz,
[0, 0, 0],
args=(vol0, shifted_vol1),
callback=my_callback)
best_params
Trying parameters [-7.5722 -4.9661 0. ]
Trying parameters [-7.9968 -4.9997 0. ]
Trying parameters [-8. -5. 0.]
Optimization terminated successfully.
Current function value: -0.995145
Iterations: 3
Function evaluations: 261
array([-8., -5., 0.])
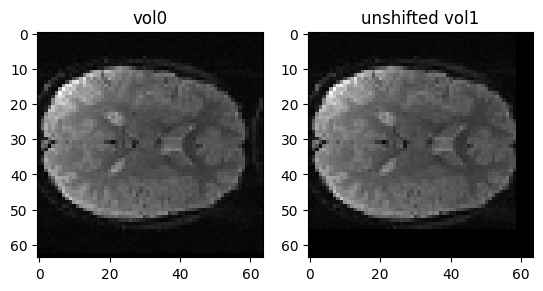
Finally, we make a new volume from shifted_vol1 with these
transformations applied:
unshifted_vol1 = snd.affine_transform(shifted_vol1, [1, 1, 1], -best_params)
fig, axes = plt.subplots(1, 2)
axes[0].imshow(vol0[:, :, 17])
axes[0].set_title('vol0')
axes[1].imshow(unshifted_vol1[:, :, 17])
axes[1].set_title('unshifted vol1')
Text(0.5, 1.0, 'unshifted vol1')
Getting stuck in the wrong place#
So far, all our cost function plots are simple, in the sense that they have one single obvious minimum. For example, here is a repeat of our earlier plot of the negative correlation value, as a function of translation in x, for the shifted single slice:
correl_mismatches = []
translations = range(-25, 15) # Candidate values for t
for t in translations:
unshifted = x_trans_slice(shifted_mid_vol1, t)
mismatch = correl_mismatch(unshifted, mid_vol0)
correl_mismatches.append(mismatch)
plt.plot(translations, correl_mismatches)
plt.title('Cost as a function of $t$')
Text(0.5, 1.0, 'Cost as a function of $t$')
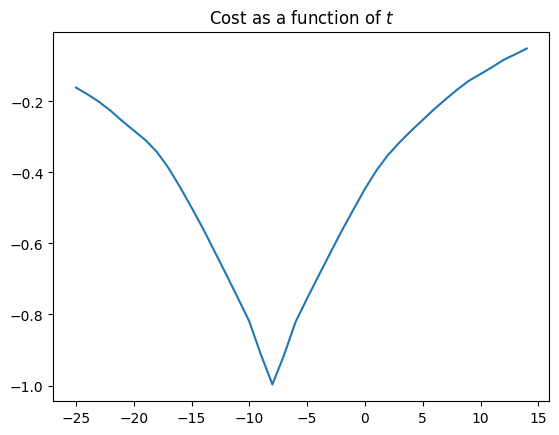
Notice the nice single minimum at around \(t=-8\).
Unfortunately, many cost functions don’t have one single minimum, but several. In fact this is so even for our simple correlation measure, if we look at larger translations (values of \(t\)):
correl_mismatches = []
translations = range(-60, 50) # Candidate values for t
for t in translations:
unshifted = x_trans_slice(shifted_mid_vol1, t)
mismatch = correl_mismatch(unshifted, mid_vol0)
correl_mismatches.append(mismatch)
plt.plot(translations, correl_mismatches)
plt.title('Cost as a function of more $t$')
Text(0.5, 1.0, 'Cost as a function of more $t$')
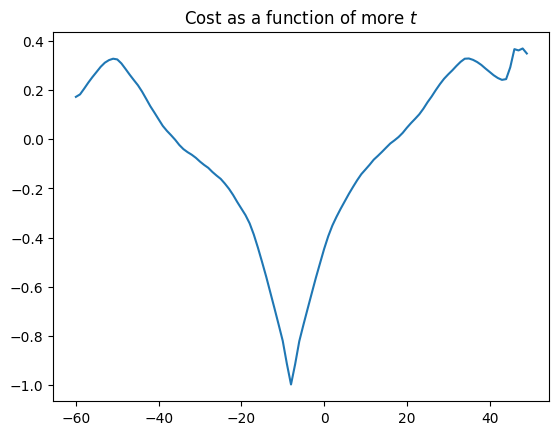
Remember that a minimum is a value for which the values to the left and right are higher. So, the -8 value of \(t\) is a minimum (with a negative correlation value of -1), but the value at around \(t=44\) is also a minimum, with a negative correlation value of around 0.2. The value at \(t=-8\) is a global minimum in the sense that it is the minimum with the lowest cost value across all values of \(t\). The value at around \(t=44\) is a local minimum.
In general, our optimization routines are only able to guarantee that they have found a local minimum. So, if we start our search in the wrong place, then the optimization routine may well find the wrong minimum.
Here is our original 1 parameter cost function. It is the same as the version above, minus docstring and comments for brevity:
def cost_function(x_trans, target, moving):
unmoved = fancy_x_trans_slice(moving, x_trans)
return correl_mismatch(unmoved, target)
Now we minimize this cost function with fmin_powell, but starting
nearer the local minimum:
fmin_powell(cost_function, [35], args=(mid_vol0, shifted_mid_vol1))
Optimization terminated successfully.
Current function value: 0.241603
Iterations: 2
Function evaluations: 52
array([43.])
Here we took a very bad starting value, but we would run the same risk if the images started off much further apart and we gave a starting value of 0.
One major part of using optimization, is being aware that it is possible for the optimization to find a “best” value that is a local rather than a global minimum. The art of optimization is finding a minimization algorithm and mismatch metric that are well-adapted to the particular problem.